El mantenimiento del amortiguador de aceite (realmente es un sistema muelle-amortiguador) es bastante fácil ya que solo se trata de limpiar las partes movibles y cambiar o rellenar el aceite.
Para sacar el muelle, primero se quita el soporte inferior que puede salir del eje del amortiguador a través de la muesca si apretamos un poco en contra del muelle.
Es útil disponer de un soporte para mantener el amortiguador en vertical (en este caso, invertido ya que el amortiguador es antiguo y el tapón está por la parte inferior):
Quitamos el tapón roscado y nos deja ver el émbolo que va unido al eje en conjunto con el tapón:
Cambiamos o rellenamos el aceite del interior. La viscosidad del aceite determina la velocidad de rebote: a mayor velocidad de rebote, la suspensión es más activa y sensible a los baches pequeños pero con baches grandes o saltos, el coche puede botar y perder la adherencia. Con menor velocidad de rebote, mejora en saltos pero con baches pequeños y muy seguidos, las ruedas pierden adherencia como si no tenemos suspensión.
El nivel de llenado suele ser 80% o 90%; lo hago con un cuentagotas para mejor precisión. Volvemos a poner el conjunto eje-tapón pero es importante mover el eje un poco (arriba y abajo) y despacio antes de roscar el tapón para eliminar las burbujas de aire que pueden haber quedado.
Si no se nota mucho el efecto menor velocidad del rebote, tal vez nos hemos quedamos cortos al rellenar; por el contrario, si el rebote es muy lento, debemos quitar un poco de aceite.
Otros amortiguadores más modernos se rellenan de aceite por la parte superior:
Se quita el tapón con llave fija para lo cual, mantenemos el amortiguador sujeto en vertical:
Rellenamos el aceite y movemos el eje del amortiguador hacia arriba y abajo para sacar las posibles burbujas de aire:
He comprado dos unidades de Variador de velocidad para motor de escobillas de 20A (20A brushed ESC) para hacer mis diseños. Según las características tienen marchas atrás y freno. La alimentación máxima es 9,4 V , vale para una LiPo 2S o siete celulas de NiMh. Son baratos: unos 3 o 4 euros.
Este variador es para motores pequeños (hasta un 380); podría valer para el 540 si es de muchas vueltas de bobinado y poca corriente de consumo.
Function: forward, reverse, brake;
Working voltage: 3.0V---9.4V. Input: Li-Po 2S / Ni-Mh/Ni-cd 4-7cell Dimensions(L*W*H): 35.0*22.0*6.0mm Current(A): 20A Driver frequency: 2KHz Constant current 20A Max 25A< 30s Pulsed 50A< 5s Brake On / with brake This ESC can work with 130/180/260/280/380 Brush Motor
Sus instrucciones (las encontré por en internet para una versión de 10 A) me aclaran cual es el conector de la batería (carcasa mayor y pines macho) y cual es el del motor (carcasa pequeña y pines hembra):
Lo que no me indica es la posición del interruptor para "freno" o "sin freno".
Los transistores Mosfet que tiene son LR8726 de tipo N y 4439GH de tipo P .
Hay otra versión que tiene el MD50P06 tipo P .
La pareja de transistores que tienen la menor resistencia Rds(on) son los que activan al motor para en el sentido avance. En el transistor Mosfet LR8726, aunque pone en la especificación la corriente máxima Id=61A, estos valores máximos no son prácticos. Es más práctico la prueba de la resistencia en conducción Rds(on) que está hecha a 20A o 25A para un uso normal.
Vemos que, aunque el ESC no tiene disipador, son transistores pueden aguantar para alimentar un motor 540 de poco consumo (55 o 62 vueltas) que solo en bloqueo subiría a 17A o 11A que podría dañar el variador en caso de permanecer así durante varios segundos .
El circuito de prueba con el motor 540 de 27 vueltas sin carga (las ruedas están en el aire) es este:
En la posición "sin freno", el motor invierte el giro de inmediato cuando cambiamos el sentido en la emisora. En la posición "con freno", el motor se frena y para cuando cambiamos el sentido en la emisora; después hay volver a la posición neutro y volver a cambiar el sentido en la emisora si queremos invertir el giro del motor.
En el vídeo, se oyen los diferentes sonidos al conectar la alimentación al ESC en la posición del interruptor "sin freno ---> La-Si-Do" y "con freno ---> 3 beep":
Finalmente, las instrucciones completas serían así:
Voy a utilizar una carrocería que tengo del Panda Citroen ZX Rally - Raid para el Master VH-X5. Esta carrocería es más larga y ancha que una touring 1/10, puesto que tiene 280mm entre ejes y 235mm de ancha. Es una medida parecida a escala 1/10 del coche que ganó el rally-raid Paris-Dakar.
Los agujeros de la carrocería ya están hechos por lo que los soportes tienen que ir a la medida; los tengo que elevar con tubos y perfiles de aluminio cortados a las dimensiones adecuadas para el largo y ancho:
Aprovecho el bastidor de las cajas del diferencial para anclar los soportes con tornillos:
He quitado el alerón, sin embargo puedo montar la carrocería antigua debajo para que no entre polvo o barro.
Así queda el Master VH-X5 con la nueva carrocería:
En el video se muestra la prueba del coche en tierra:
Foto de Badiola RC (http://rcclassic.blogspot.com)
Tengo un Master VH-X5 (buggy de motor nitro 1/10) que lo obtuve casi regalado; es un coche chino barato y de iniciación y por lo visto se le rompen muchas piezas por desgaste. Lo tengo sin el motor y tiene varios problemas:
* el diferencial trasero está mal porque a veces no giran las ruedas cuando giras con la mano el engranaje central que va al motor (síntoma de dientes de engranajes partidos o gastados).
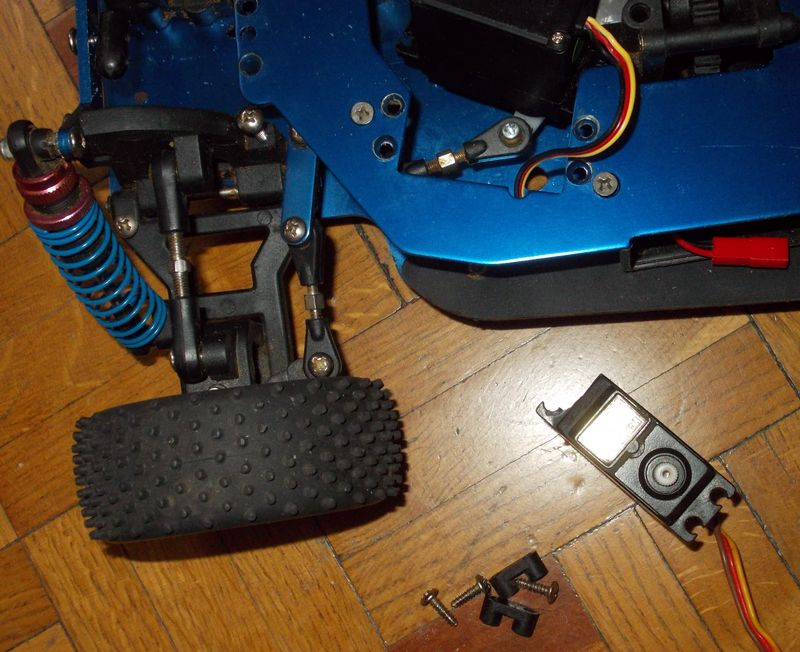
* el servo de la dirección tiene un soporte roto.
Este coche lo voy a pasar a motor eléctrico con el soporte "casero" del motor pero lo primero reparar los problemas que tiene.
Es un coche que se sacó con varios nombres en torno al año 2002: Smartech Speedy Tiger - Winner Sport, Stormracer o Victory Hawk VH X5. Las instrucciones del Smartech son estas:
Y aquí tienes la Explode View o diagrama de piezas:
Para sacar el diferencial trasero hay que quitar:
* tapa atrás: 2 tornillos.
* panel superior (parte arriba): 2 tornillos.
* chasis (parte abajo): 3 tornillos.
Luego hay que quitar los tres palieres que van al diferencial y para eso desatornillamos los brazos de suspensión. Una vez quitados los palieres, el diferencial esta suelto pero para sacarlo hay aflojar los tornillos de panel superior y sacarlo por el hueco. Aprovechamos para limpiar el chasis del coche:
Abrir el diferencial es fácil; sólo hay que quitar dos tornillos. Se ve que algunos dientes de la corona grande están gastados:
Quitar la corona del diferencial es fácil porque solo va sujeta con 4 tornillos:
Hay que cambiar la corona de 34 dientes (34t bevel gear) o cambiar el diferencial entero con las medidas indicadas. El piñon de ataque tiene 11 dientes.
Buscando en internet, he encontrado varias referencias de la corona o el diferencial interior entero:
Smartech (11256, 11255, 103079), Carson (105110, 105148), Jamara (505073).
Miramos también el diferencial delantero; es más difícil de sacar porque tienes que quitar muchos tornillos y desmontar casi la suspensión delantera:
* quitar el parachoques delantero: 2 tornillos.
* 3 tornillos de sujeción del diferencial y 6 tornillos que sujetan las torres de suspensión, todos por la parte de abajo.
* brazos de dirección: 2 tornillos.
*6 tornillos del panel superior.
El diferencial se saca por el hueco, levantando las torres de suspensión y la tapa superior; nos molestan los palieres para sacarlo, así que los sacamos antes, al menos el palier central.
Abrimos el diferencial para comprobar que los dientes están bien quitando solo dos tornillos; es igual al diferencial trasero, solo cambia la caja:
Mientras me llega la pieza (corona), voy a montar el diferencial trasero con las partes que están bien del diferencial delantero y prodría usar el coche con solo tracción trasera; introduzco una arandela de 10mm entre el rodamiento y la corona para quitar un poco de holgura lateral entre la corona y el piñon de ataque:
Engrasamos y montamos de nuevo el diferencial trasero con la corona nueva.
También hay que cambiar el servo de dirección que tiene un soporte roto; usamos el servo del acelerador que es el mismo modelo. Primero atornillamos la articulación del eje al brazo de dirección ya que va a quedar por debajo del panel superior:
Luego, ponemos los 4 tornillos de sujeción del servo, girando el panel y aprovechando que el brazo de dirección articulado también puede girar:
Así queda el coche con el diferencial trasero montado (falta el diferencial delantero) y desmontado de los elementos que sobran: servo de acelerador, tubo de escape, deposito de combustible, varillas de acelerador y freno, disco de freno y zapatas:
Ya me ha llegado la corona del diferencial delantero desde China (casi un mes); procedo al montaje y engrase quitando la corona rota anterior:
Para poner un motor electrico, sea brushless o con escobillas, necesito un soporte pero no hay ninguno que encaje correctamente en la transimisión central. Voy a usar un soporte general para motor 540 que se vende en internet y que tendré que adaptar o modificar:
He tenido que hacer agujeros con forma de ranura el chasis para ponerlo; incluso he cortado una zona del soporte que tocaba en la tranmisión; también aprovecho las ranuras de sujección del anterior motor nitro:
El motor de escobillas que he puesto es un 550 19 vueltas Speed-600 de Graupner: 19200 rpm y 2A sin carga testeado por mi y unos 140W de potencia máxima según el fabricante. El coche, con un piñon de 15 dientes y modulo 1, tiene una transmisión final de 9,5:1 (15/46*11/34).
Según el fabricante, el motor se puede alimentar a 11,1V (lipo 3S) si no es una transmisión directa. En el video se ve como funciona:
Tal y como está la transmisión con piñon de 15 de dientes, el coche alcanzaría 28-29 km/h a unos 17000rpm con un consumo medio de unos 9.7A a 7,2 voltios. Con la batería Lipo de 11,1V , el coche alcanzaría 45-46 km/h a unos 27200rpm con un consumo medio un poco más de 10A ., según la simulación de Excel con los datos del coche y del motor.
A 7,2V y un piñon de 15 dientes, el motor aún no ha llegado a la máxima eficiencia y va sobrado de par (torque) por lo que se puede poner un piñon de 19 o incluso 21 dientes. La velocidad máxima sería mayor, a costa de menor aceleración y más consumo de corriente media (el motor se calentaría un poco más).
Con un piñon de 19 dientes, la relación de transmisión sería 7,5:1 (19/46*11/34) y la velocidad máxima de unos 35km/h a unas 16500rpm a 7,2V. El consumo de corriente media estaría por 11,5A.
Como el motor tiene un eje de 3.2mm y los piñones de módulo 1 se venden para ejes de 5mm, utilizo espaciadores de latón-bronce usados en electrónica a los que taladro el agujero a medida y/o corto en canal para que se adapten:
El coche queda como se ve en la imagen: el variador electrónico BDESC-S10E valido para 2S/3S situado en el chasis delante del motor, el receptor de 2.4Ghz Flysky montado en el subchasis y la bateria esta situada en el espacio del cajón antiguo, debajo del subchasis, porque no hay otro sitio para ponerla.